
特別講演
日 時:6月8日(火) 9:00-10:00
場 所:オンライン開催(ポータルサイトにて案内します)
講演題目:SuperLimbs
講演者:H. Harry Asada(Department of Mechanical Engineering, Massachusetts Institute of Technology)
講演概要:
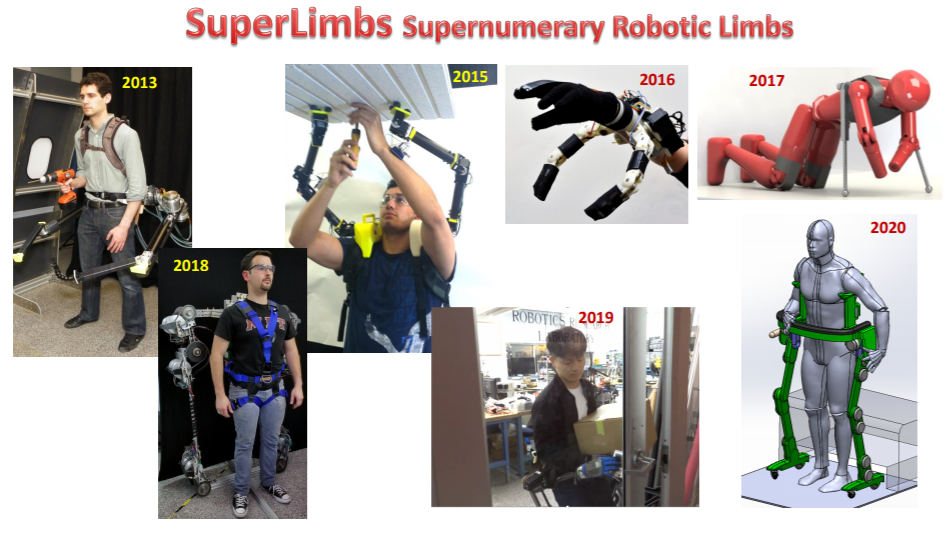
Supernumerary Robotic Limbs, or SuperLimbs for short, are wearable extra arms and legs for augmenting the physical abilities of the wearer. SuperLimbs can be attached to various locations on the human body, providing the wearer with a broad spectrum of functionalities. While still a new field, SuperLimbs show promise both as an assistive technology for people with disabilities, including stroke survivors and elderly people, and as an augmentation technology for various industrial applications, ranging from manufacturing, construction, and infrastructure maintenance to rescue and emergency transponder support. Unlike powered exoskeletons, SuperLimbs do not have to move together with the individual joints of a wearer but can move independently of the human limbs. While this allows SuperLimbs to create various functionalities, communication and control are more challenging for SuperLimbs, compared to conventional wearable robots. This talk will introduce various SuperLimb designs for diverse applications, and address the communication and control challenge. In particular, a new framework of human-robot communication, called voluntary and reactive control, will be discussed and its application to hemiplegic patient support will be described. The talk will be concluded by addressing challenges for the future.
講演者略歴:
H. Harry Asada is Ford Professor of Mechanical Engineering and Director of the Brit and Alex d’Arbeloff Laboratory for Information Systems and Technology in the Department of Mechanical Engineering, Massachusetts Institute of Technology (MIT), Cambridge, MA. He received the B.S., M.S., and Ph.D. degrees in precision engineering in 1973, 1975, and 1979, respectively, all from Kyoto University, Japan. He specializes in robotics, biological engineering, and system dynamics and control. His current robotics research includes neuro-motor control associated with wearable extra limbs and their applications to aircraft manufacturing, heavy industries, and prosthetics. His research in the bio area focuses on bio-integrated robots, where live cells and tissues are used as components. He received Best Paper Awards at the IEEE International Conference on Robotics and Automation (ICRA) in 1993, 1997, 1999, and 2010, the Best Application Paper Award at the 2017 IROS, the O. Hugo Schuck Best Paper Award from the American Control Council in 1985, and Best Journal Paper Awards from the Society of Instrument and Control Engineers in 1979, 1984, and 1990. He was the recipient of the 2011 Rufus Oldenburger Medal from ASME, the Henry Paynter Outstanding Researcher Award from ASME Dynamic Systems and Control in 1998, and the Ruth and Joel Spira Award for Distinguished Teaching from the School of Engineering, MIT. Dr. Asada is a Fellow of ASME.
チュートリアル・ワークショップ
日 時:6月6日(日)
6月6日(日)のみの参加は,参加登録費を支払う義務はありませんが,参加する場合は,各チュートリアル・ワークショップに個別に事前参加登録する必要があります.
なお,チュートリアル・ワークショップについても,すべてオンライン開催となります.
- シンポジウム 「"いいかげん”を科学して未来を創るソフトロボット学2」
- ワークショップ 「無料体験!MATLABとSimulink無料体験会:自律ロボティクス開発入門」
- ワークショップ 「地域交流ワークショップ「地域の課題への挑戦」
- ワークショップ 「MEMSセンシング技術の最新動向」(計測自動制御学会システム・情報部門自律分散システム部会主催)
- ワークショップ 「ラボラトリーオートメーション月例勉強会(出張版)」
- ワークショップ 「FA設備技術勉強会」
- ワークショップ 「柔軟エンドエフェクタシステムの開発と実用化」
- ワークショップ 「どうなるの? ロボットとの暮らし」
- チュートリアル 「ROBOMECH2021 RTミドルウェア講習会」
- チュートリアル 「ロボット制御・教育学習再考」
- チュートリアル 「インターネットを利用したロボットサービス基盤としてのRSNP講習会」
- チュートリアル 「中小企業のスマート化による生産性向上 FS支援事業 事例紹介」
部門登録者総会
部門登録者総会
日 時:6月6日(日) 17:00-18:00
場 所:オンライン開催
部門登録者総会では,部門長や各種委員会委員長が部門の活動状況を報告します.ロボティクス・メカトロニクス部門の状況を知る良い機会ですので,是非ご参加ください.
部門登録者(注)(ロボティクス・メカトロニクス部門を 1~3 位までに登録されている会員)以外の方の参加も歓迎いたします.ロボティクス・メカトロニクス部門に登録されていない方は,この機会に是非部門登録をご検討ください.入会・部門登録をご希望の方は,日本機械学会への会員申し込みはこちらのサイトを,部門登録のご案内はこちらのサイトをご参照ください.
表彰式
日 時:6月7日(月) 11:00-11:45
場 所:オンライン開催
受賞者一覧